จดหมายข่าว
ในการลงทะเบียนสมัครรับจดหมายข่าว Erhardt+Leimer และรับข่าวสารที่น่าสนใจเกี่ยวกับผลิตภัณฑ์และนวัตกรรมของเราเป็นประจำ
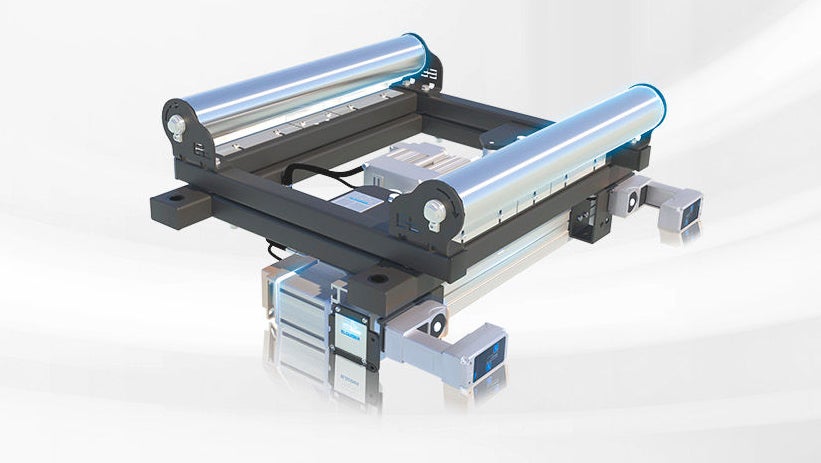
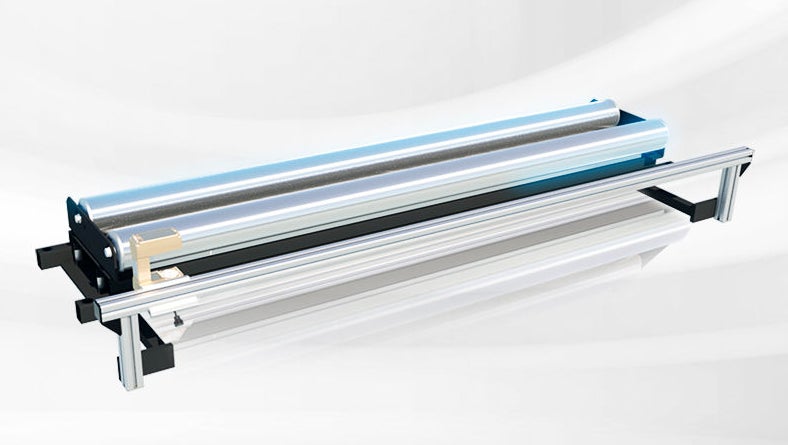
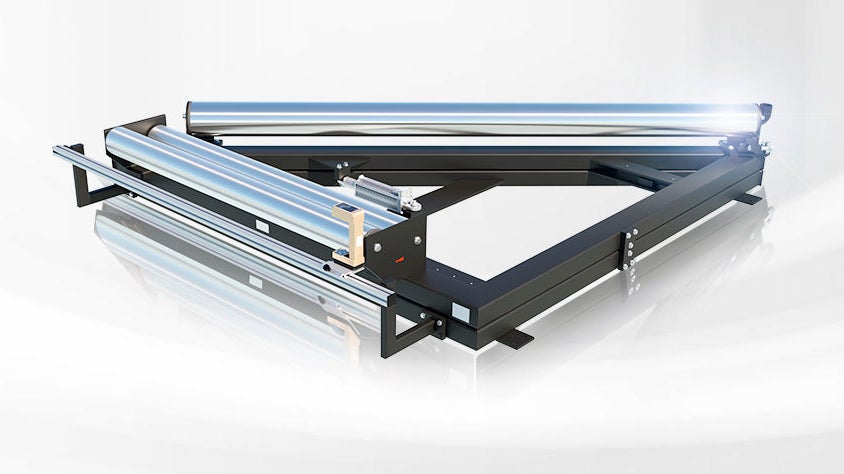
ระบบอัตโนมัติ & Vision
จะมีการหมุนและปรับรางจ่ายวัสดุอย่างแม่นยำตามกระบวนการ Erhardt+Leimer นำสนอโซลูชันการออกแบบที่แตกต่างกันสำหรับรางเลื่อน